164799
B66C9/16, H02P5/52, H02P21/06, G05B19/02
Заявка: 2015127272/11, 7.7.2015
Опубликовано: 20.9.2016. Бюл. № 26
Авторы: Г.А. Федяева, Д.В. Кочевинов, Т.В. Сморудова, Д.В. Конохов, В.Н. Бойко
Патентообладатель: ФГБОУВПО "Брянский государственный технический университет"
Система автоматизированного управления асинхронным электроприводом передвижения с коррекцией поперечного смещения
СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕДВИЖЕНИЯ С КОРРЕКЦИЕЙ ПОПЕРЕЧНОГО СМЕЩЕНИЯ
Формула полезной модели
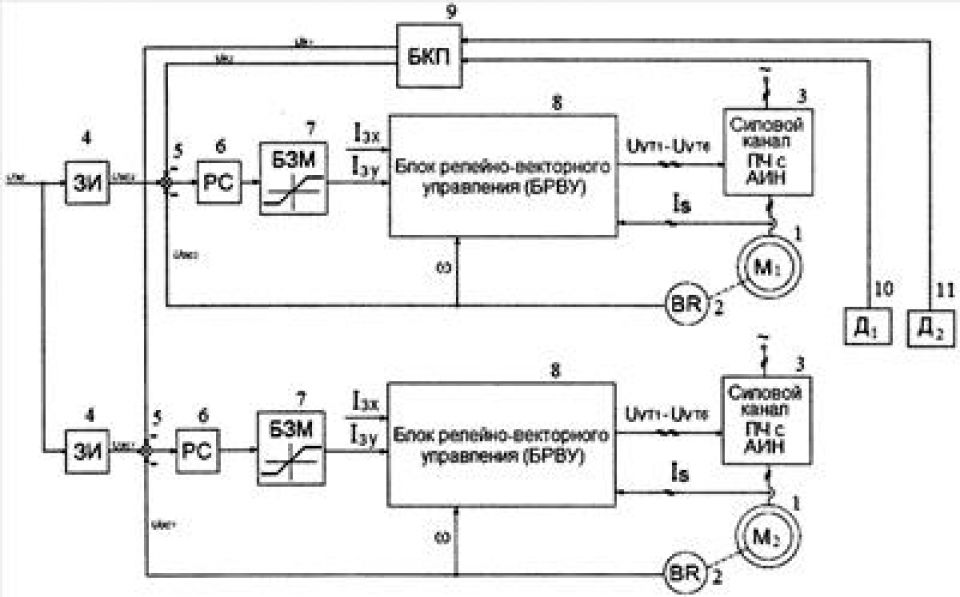
Система автоматизированного управления асинхронным электроприводом передвижения с коррекцией поперечного смещения мостового крана, содержащая преобразователи напряжения и частоты, датчики частоты вращения электродвигателей, сумматоры, на входы которых поступают сигналы задания скорости и сигналы обратных связей по скорости, формирующие на выходах сигналы ошибки, равные разности между соответствующим заданием на скорость и сигналом обратной связи по скорости, регуляторы скорости, входы которых подключены к выходам соответствующих сумматоров, асинхронные электродвигатели, задатчики интенсивности, формирующие сигналы задания скорости, исходя из заданных предельных ускорений крана, два бесконтактных датчика расстояния, блок коррекции перекоса, отличающаяся тем, что в систему введены блоки релейно-векторного управления (БРВУ), на входы которых подаются сигналы скорости двигателей, а с выхода подаются сигналы управления на преобразователи частоты, которые снабжены датчиками тока фаз двигателя, и с выходов преобразователей частоты подаются сигналы этих датчиков на входы блоков БРВУ, введены блоки задания момента двигателей с учетом ограничения по моменту, формирующие задание тока двигателей по оси игрек, входы которых подключены к выходам регуляторов скорости, а выходы - к входам блоков БРВУ, введены сигналы задания номинального тока по оси икс, подающиеся на вход блоков БРВУ и обеспечивающие управление двигателями при номинальном потокосцеплении ротора, причем сигналы двух бесконтактных датчиков расстояния, выходы которых подключены к входам блока коррекции перекоса (БКП), выходы которого введены в систему управления скоростью электродвигателей и подключены к входам соответствующих сумматоров, обеспечивают совместно с БКП коррекцию сигнала задания скорости электродвигателя опережающей опоры таким образом, чтобы, замедляя его, устранить поперечное смещение крана относительно рельсов.