СПОСОБ ОГРАНИЧЕНИЯ ПЕРЕКОСА МОСТОВОГО КРАНА
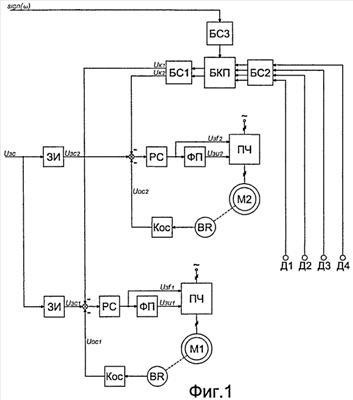
Изобретение относится к области мостовых кранов. При ограничениия перекоса мостового крана с асинхронным электроприводом передвижения (M1, M2), положение крана определяют по дифференциальным значениям 12 и 34, получаемым путем разности показаний бесконтактных датчиков (Д1, Д2, Д3, Д4), измеряющих расстояния от мест их установки до рельсов. С учетом направления движения крана происходит формирование сигнала коррекции (Uk1, Uk2), который вычитается из сигнала задания скорости (U3c1, U3c2) одной из опор, и этим обеспечивают выравнивание крана; значение корректирующего воздействия рассчитывают пропорционально максимальной из 12 и 34 величин по формуле: Uk=k×max( 12; 34). Достигается бесперекосное движение мостового крана. 1 табл., 2 ил.