H02M7/53
Заявка: 2020124525, 14.7.2020
Опубликовано: 21.4.2021. Бюл. № 12
Автор: А.И. Андриянов
Патентообладатель: ФГБОУВО "Брянский государственный технический университет"
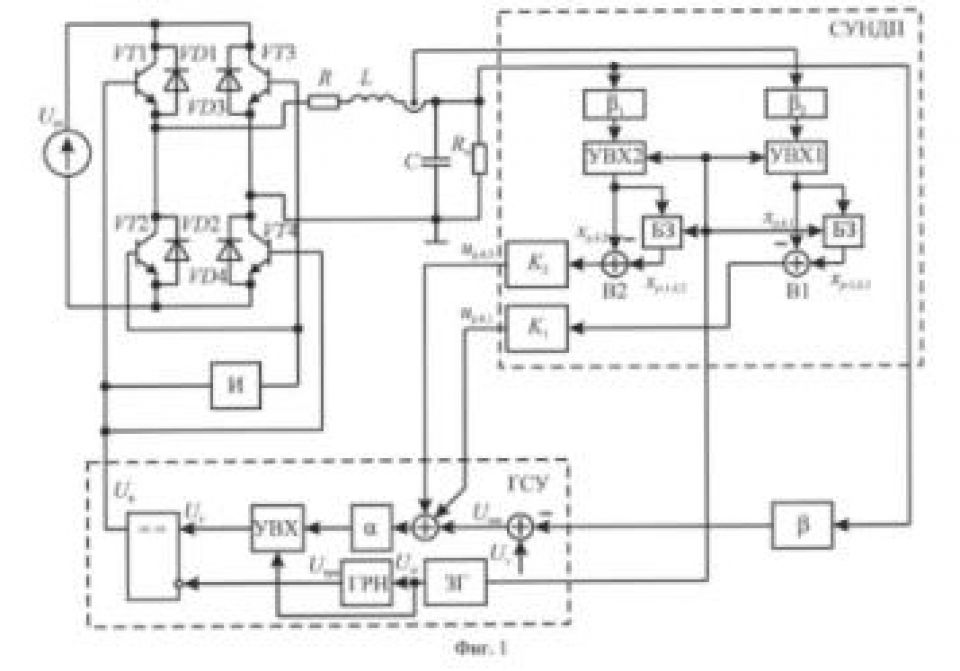
СПОСОБ УПРАВЛЕНИЯ НЕЛИНЕЙНЫМИ ДИНАМИЧЕСКИМИ ПРОЦЕССАМИ В ОДНОФАЗНЫХ ИНВЕРТОРАХ НАПРЯЖЕНИЯ С СИНУСОИДАЛЬНОЙ ДВУХПОЛЯРНОЙ РЕВЕРСИВНОЙ МОДУЛЯЦИЕЙ
Заявленное изобретение относится к преобразовательной технике и может быть использовано при реализации цифровых систем управления однофазными инверторами с синусоидальной широтно-импульсной модуляцией с возможностью исключения опасных колебаний выходного напряжения, возникающих при определенном наборе параметров системы. Предлагается алгоритм для управления нелинейной динамикой, реализуемый за счет того, что импульсы управления на ключи силовой части, состоящей из мостового инвертора и Г-образного LC-фильтра, подает система управления, включающая две подсистемы: главную подсистему, представляющую собой стандартную систему автоматического управления по отклонению и состоящую из вычислителя ошибки, вычисляющего разность между сигналом задания и сигналом обратной связи, усилителя обратной связи с заданным коэффициентом, регулятора, усиливающего сигнал ошибки с заданным коэффициентом, сумматора, на один из входов которого подается сигнал после регулятора, а на второй - сигнал от вспомогательной системы управления динамическими процессами, устройства выборки-хранения, фиксирующего сигнал управления в дискретные моменты времени, выходной сигнал которого подается на компаратор, сравнивающий этот сигнал с развертывающим напряжением, поступающим от специализированного генератора, и формирующий управляющие импульсы силовыми ключами, что позволяет обеспечить синусоидальное выходное напряжение высокого качества в широком диапазоне вариации параметров системы; систему управления нелинейными динамическими процессами. При расчете корректирующих воздействий в дискретные моменты в системе управления нелинейными динамическими процессами используются значения фазовых переменных в дискретные моменты на предыдущем периоде низкочастотного процесса, вычитание из которых с помощью вычитателей переменных состояния в дискретные моменты времени на текущем периоде низкочастотного процесса, фиксируемых устройствами выборки-хранения и масштабированных с заданными коэффициентами, формирует вектор невязки, компоненты которого умножаются на заданные коэффициенты, и далее компоненты вектора невязки подаются на сумматор главной подсистемы управления, что позволяет влиять на сигнал ошибки и обеспечивать устойчивость требуемого динамического режима. Техническая реализация предлагаемой системы управления не требует применения дорогих производительных микроконтроллеров и может быть реализована путем незначительной модификации схемы стандартного устройства. 3 ил.